
We were recently asked to provide an aerial LiDAR survey of a 25,000m² area of dense forestry. The purpose of the LiDAR survey was to create a digital terrain model, of the land beneath the canopy, accurate to ordnance survey. The project provided an excellent opportunity for us to run some tests on data output when flying the LiDAR sensor at various heights.
Methodology
We deployed one of our M300 RTK drones and equipped it with our Zenmuse L1 sensor. The RTK module was connected to the NTRIP service and the flight path planned. Rather than use the accepted overlap settings for LiDAR scanning, we adopted the 70% side and 80% front overlap for photogrammetry as we wished to capture photogrammetry for further comparison. In addition, the sensor was set to 3 returns, repetitive scanning and a flight speed that would generate more than 300 points per m². The higher we flew, the slower the flight to ensure the resolution was maintained.
Weather conditions included a mild breeze, light cloud and good visibility. IMU calibration was processed pre, during and post recording as per manufacturers guidelines. Flights were flown at 50m, 80m and 120m above ground level using DJI’s inbuilt terrain awareness settings.
Ground control was used throughout the site and measured data outputs were within the manufacturers variance parameters of 100mm on the x and y axis and 50mm on the z axis. All ground control and drone collected data was captured in WGS84 and then converted to OSGB 1936.
Outputs
The outputs were processed via DJI Terra and subsequently cleaned, vegetation removed and points rasterised. The final point clouds were set to a 1 metre resolution based on the lowest z value per metre grid. The data sets were then compared to count the number of points that were produced by the three different flight altitudes.
The output was as follows:
| Flight Height (AGL m) | 50 | 80 | 120 |
| Initial Ground points (below the canopy) | 10,234,354 | 8,559,093 | 5,866,877 |
| Visible Points on rasterised grid | 27,519 | 25,867 | 22,069 |
| Vertical RMSE (mm) | 17 | 29 | NA |
| RMSE (mm) | 76 | 96 | NA |
As expected, the density of points for lower flights were higher however, an increase in height by 60% only saw a reduction in points of 16% and an increase in height by 140% saw a 43% reduction. There is a negative correlation between height and density however it’s less than a 1:-1 ratio. The volume of data is influenced by height but height is not the sole causation. If it were, we would expect the volume of data to reduce by 4x every time we doubled the height as the sensor field of view is constant. As you increase the height by 2x, the sensor captures 2x the width and 2x the height hence we get 4x the area. An additional causation is flight speed as the higher we flew, the slower the drone flew to ensure we captured more than 300 points per m². In essence, each m² area of land received the same volume of lasers. From our short survey, it appeared that 1,355,000 less points were captured for every 10m higher than 50m that the data was collected per 25,000 square metre survey area. Bearing in mind that this number solely reflects the ground points after the initial vegetation was removed.
LiDAR survey v Photogrammetry survey
From looking at the images below, it is clear to see that the LiDAR survey, at all altitudes, was substantially more effective than photogrammetry. This is because the LiDAR can identify a single xyz point even if it only sees the point once. Photogrammetry, on the other hand, needs to see each xyz point from several different images so that it can cross triangulate the location. This becomes substantially more difficult with vegetation. Note the large gaps in the data of the photogrammetry ground points and rasterised grids. This occurred in photogrammetry at all heights (50m, 80m and 120m)



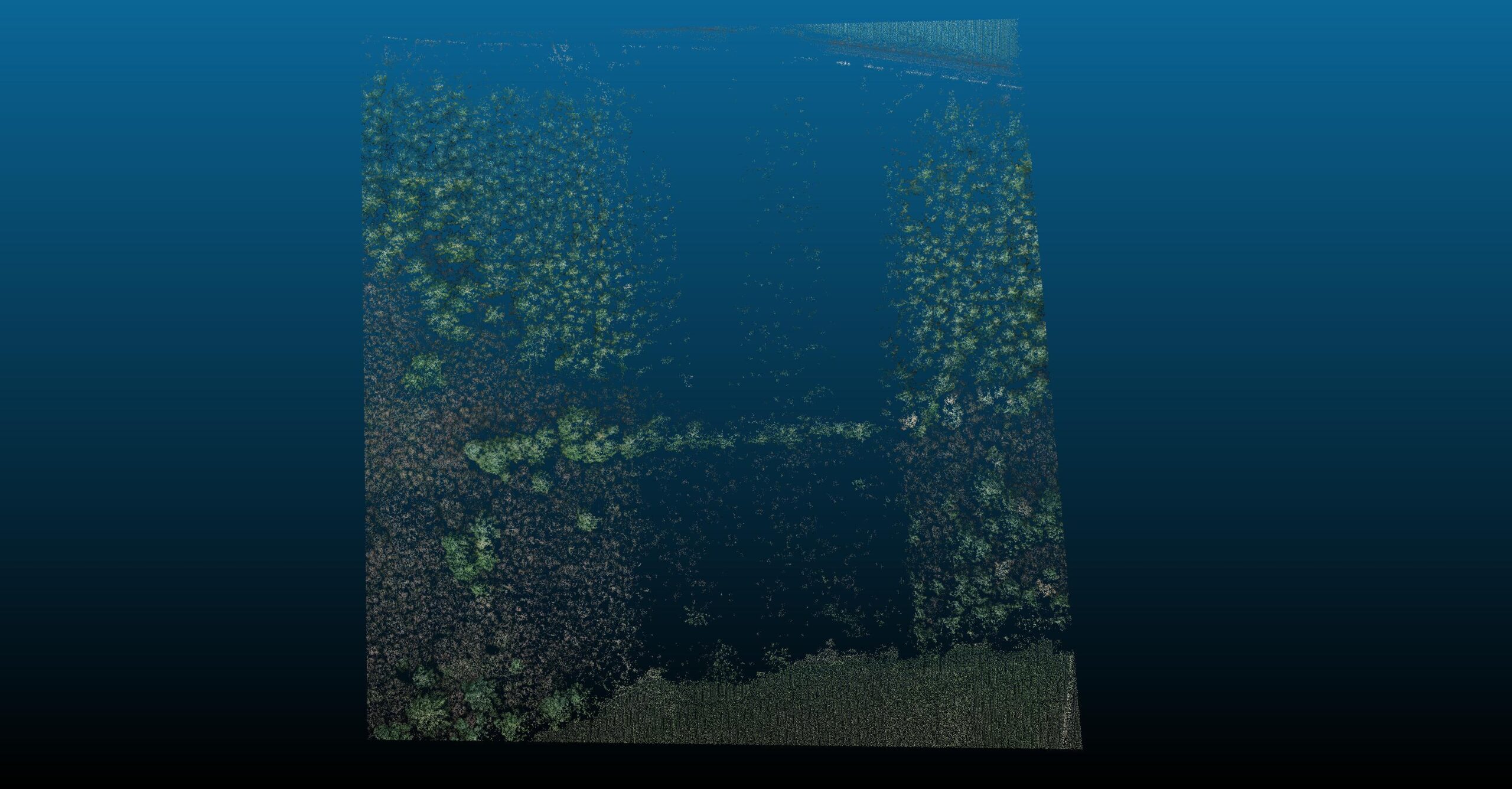
LiDAR wasn’t just more effective at creating a point cloud but it also returned more accurate data. If you look at the rasterised grids from all 3 LiDAR surveys, they all show a very similar/near identical topography with minor differences that we would expect from a LiDAR RTK survey, The photogrammetry flight was unable to produce an accurate digital terrain model and produced many false z values in areas where their was vegetation. This is to be expected as photogrammetry performs better in areas with no or minimal vegetation.
LiDAR isn’t perfect and it also had gaps in the data. This is because LiDAR is not Xray. In other words, it can’t see through objects. Areas with extremely thick vegetation, that prevent the laser beams reaching the ground, produce no data. However, when you view the image at the top of this page, you will note that the canopy of the forest is very dense. In our opinion, the LiDAR has been very effective at capturing the terrain data at this site. If you look closely at the rasterised images below, you will note that there are a number of man made trenches in the area and that these are clear to identify from the survey.




Findings – LiDAR
It is evident that LiDAR is an effective tool when measuring elevation data beneath vegetation – even in instances where the vegetation canopy may appear, to the naked eye, to completely block all light to the ground. LiDAR relies on the smallest of gaps to capture the terrain data. Although not covered in this blog, LiDAR does require more than a single return to achieve this penetration. We recommend a sensor with 3 returns for areas with thick vegetation. This lets each laser beam capture 3 separate returns at 3 different elevations which, in turn, increases the likelihood of a return from the base terrain.
Flight height, speed and overlap
The height of the drone flight is not the only factor to consider when using drone mounted LiDAR. Other factors such as flight speed must be taken into consideration when we measure the density of points captured in the survey area. Whilst height does have a negative correlation with the density of points collected, this correlation sits below the ratio of 1:-1 when flights speeds are reduced (e.g. twice the height does not result in half the points). The most likely reason for this will be because an increase in height, will reduce the potential angles that the light beams can penetrate through the canopy. The sensor is kept in a static position capturing only nadir data when flown in pre-programmed LiDAR mapping mission. Thus, lower flights generally have more flight paths to capture an area of land. If you imagine a lawnmower cutting grass. It would run multiple parallel routes with a degree of overlap to ensure the grass is cut efficiently. Well, LiDAR flight paths are very similar. As the drone flies higher, the area captured by the sensor increases and therefore the number of parallel flights paths needed is reduced. By reducing the number of flight paths, you reduce the number of gaps in the canopy that the sensor will be able to scan.
The trick to it all is being able to calculate the correct flight height, speed and overlap to ensure that you can deliver the required output for the operation. based on the case above, we would probably opt for 80m flight height with terrain follow switched on. This produced a minor reduction in points of only 6% when compared to the 50m flight. Overall flight time was shorter and the visual line of sight would be easier to maintain. In essence this would provide a good balance between data quality and flight efficiency.
Note. This blog does not suggest that LiDAR is a more accurate survey tool than photogrammetry. Instead it looks at how effective LiDAR is at different flight heights. Photogrammetry continues to be very effective in areas with small or no amounts of vegetation.